
3D Motion Tracking
As part of my work for the Bucknell Soft Robotics Lab, I developed a 3D tracking system to map the workspace of our robot. The system used a Microsoft Kinect, a cheap and accessible infrared sensor. The Kinect contains two main sensors, a standard RGB camera, and a depth sensor. The resolution of both sensors is the same, so using the Kinect SDK and some MATLAB tools, it is possible to acquire a matrix of values for each pixel containing RGB and depth information.
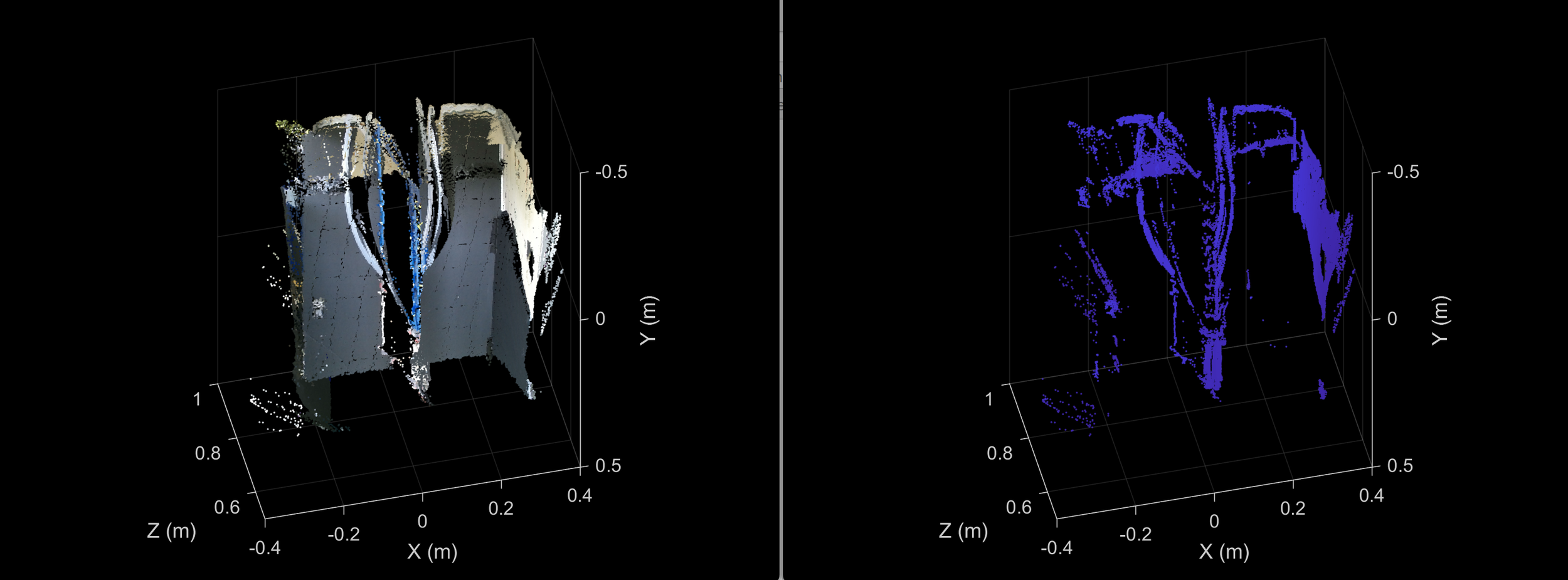
Using the RGB and depth data, I wrote a MATLAB application that would isolate datapoints that fell within a specific color range. This way I could easily capture the 3D position wherever I placed red tracking dots.

My program then captured the position of the tracking dots, moved the soft robot by adjusting the air pressure a small amount, and measured again. I repeated this for a wide variety of pressure combinations to obtain an accurate representation of the robot’s workspace.



